

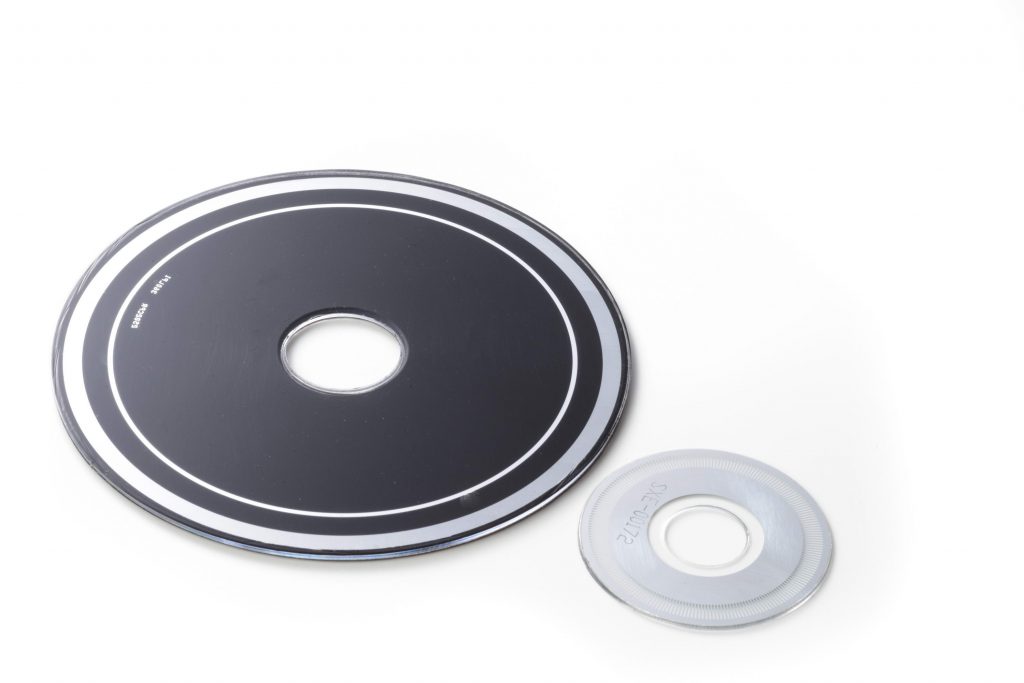
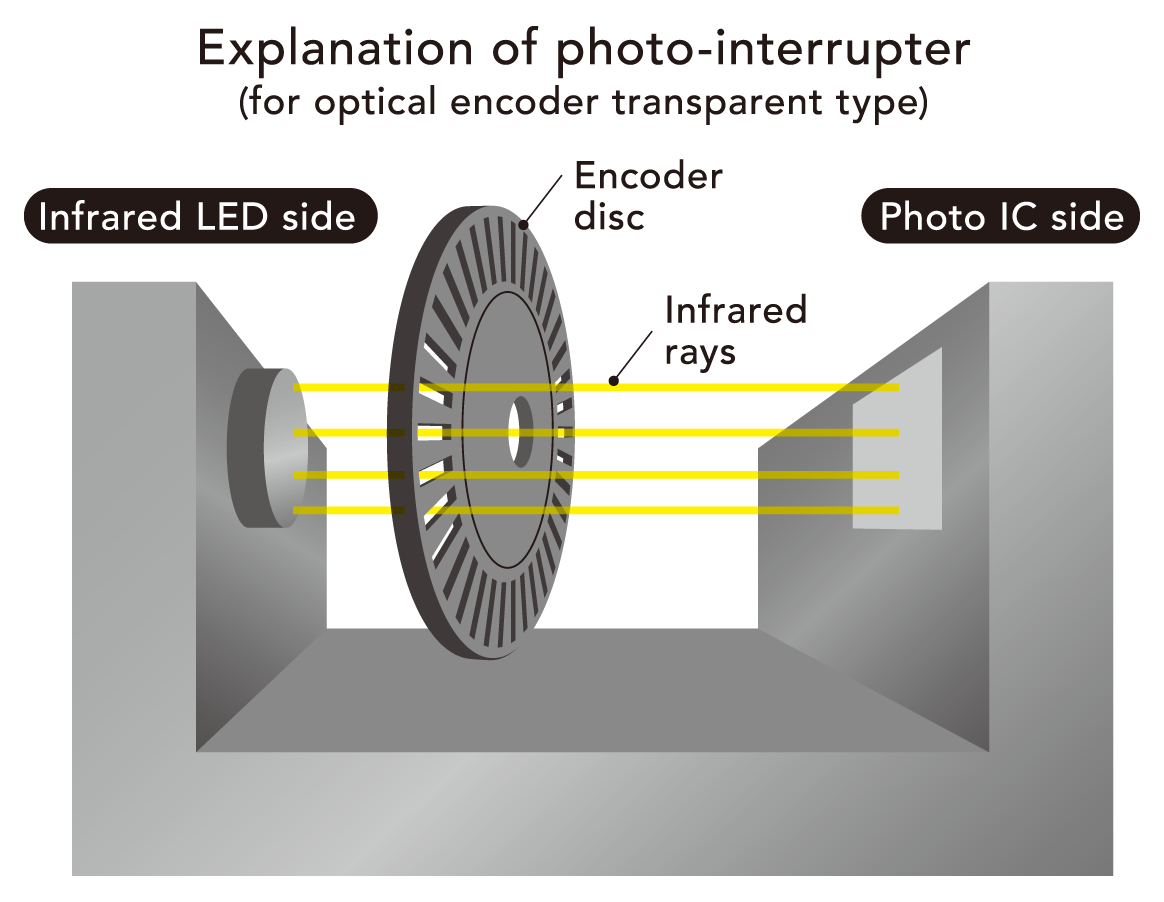
Fig. Optical Encoder
Optical encoders are widely used in office equipment, machine tools and industrial robots as high-precision position control sensors. In recent years, reflective encoders have been used in ultra-compact actuators and in cooperative robots that require a small amount of space.
Difference from Magnetic Encoders
There is a type of encoder called a “Magnetic Encoder” that is a counterpart to an optical encoder.
A magnetic encoder is a type of encoder that uses a magnetic sensor to detect changes in the magnetic field. They are simple, compact, and highly durable.
The magnetic type combines a magnetic drum and a magneto-electric conversion element such as a magneto-resistive element, and has a structure that can easily increase mechanical strength.
On the other hand, its disadvantage is that its resolution and accuracy are lower than those of optical encoders.This is because the resolution of magnetic encoders depends on the performance of the signal processing circuit, since the resolution is determined by the processing capacity of the electrical signal.
| Feature\Type | Optical Encoders | Magnetic Encoders |
|---|---|---|
| High resolution | ✓ | |
| High precision | ✓ | |
| Environmental resistance | ✓ | |
| Small size and light weight | ✓ | |
| Low price | ✓ |
Here are our products
Optical Encoder Wheels

Types of Optical Encoders
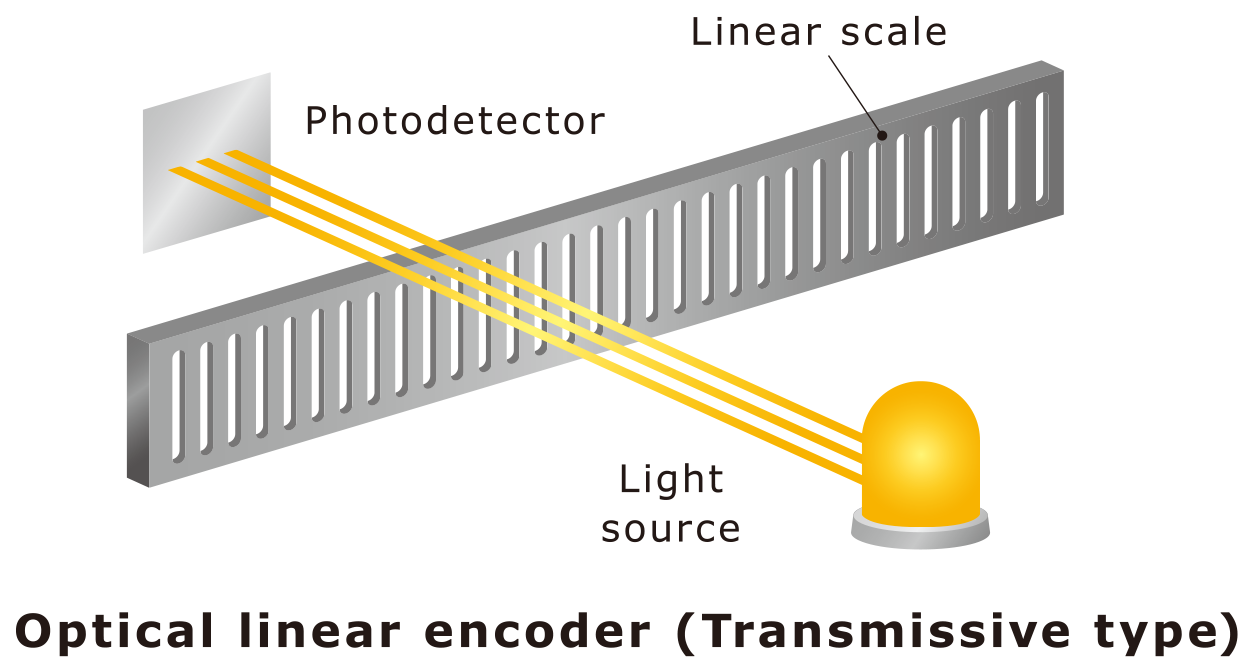
Optical encoders are classified by (1) Direction of motion to be measured, (2) Signal output method, and (3) Optical path.
1) Direction of motion to be measured
Optical Linear Encoders
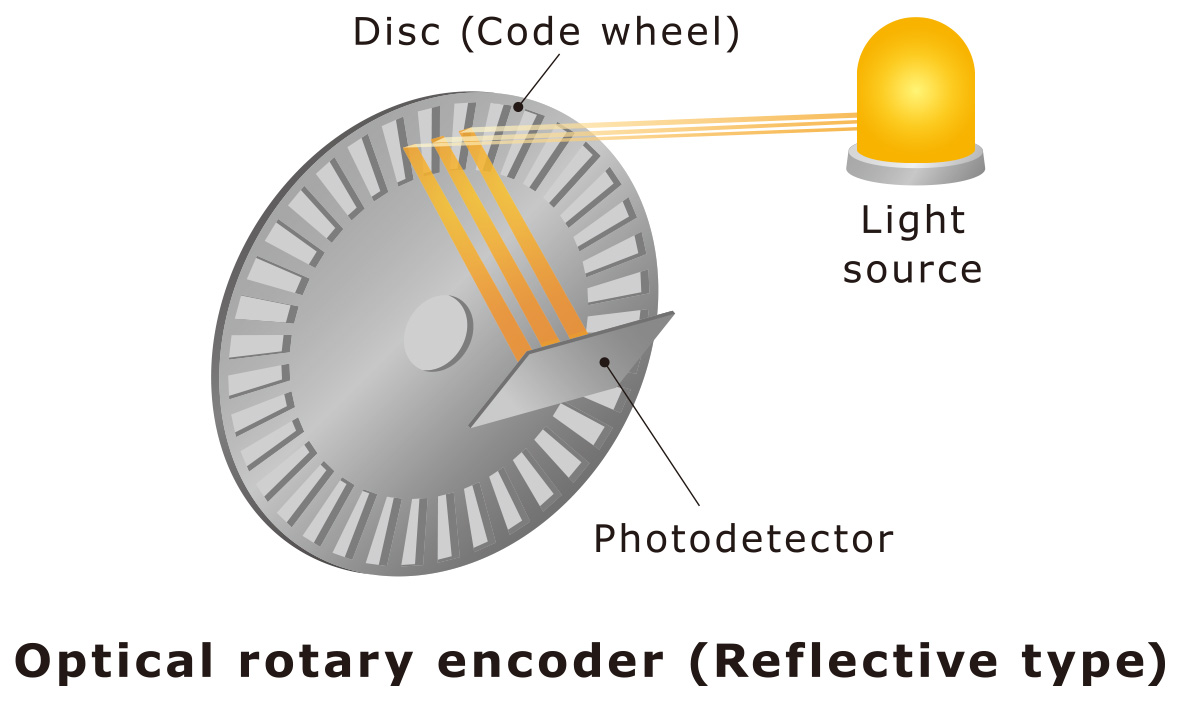



The advantages of the reflective encoder are:
- Easy to be manufactured thinner and smaller
- Simple assembly process
However, it has the following weaknesses
- Low contamination resistance
- Low signal accuracy
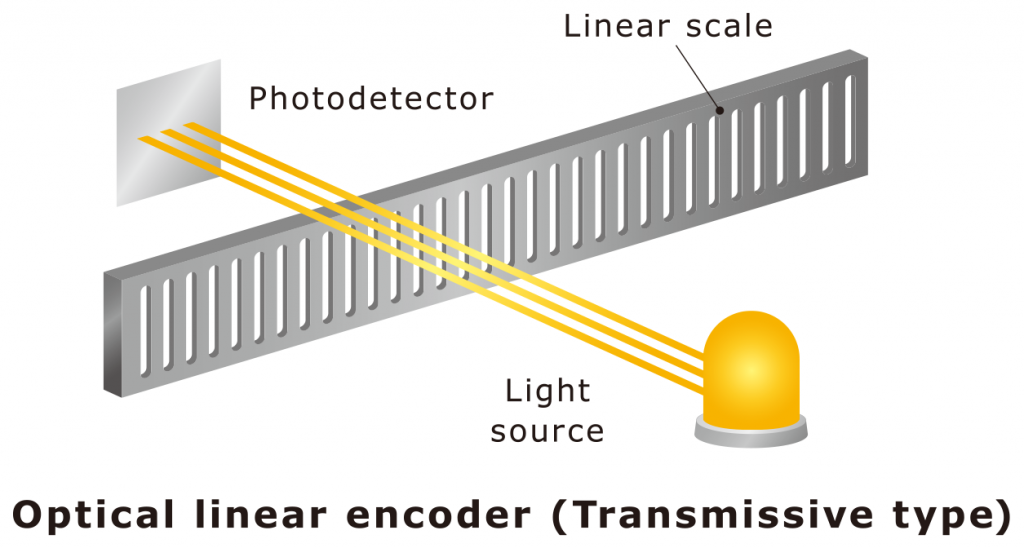
| Feature\Type | Transmissive | Reflective |
|---|---|---|
| High signal accuracy | ✓ | |
| Contamination resistance | ✓ | |
| Simple structure | ✓ | |
| Miniaturization | ✓ | |
| Assembly time | ✓ |
Here are our products
Optical Encoder Wheels
Here are our products
Optical Encoder Wheels
Where are Optical Encoders used?
Joints of Robot Arm
There are many types of mechanical position/posture sensors, but generally, manufacturers in robotics industry use articulated arms with rotary encoders placed at the joints.
It is necessary to use either a 3-DOF type that measures only position or a 6-DOF type that measures both position and posture depending on the number of joints to be measured.
In some special case, there is also a motion capture device with encoders placed at the positions corresponding to the joints of the human body to measure its movement.
Doors of Elevator

There is a motor controlling opening and closing the elevator door, and it requires low noise due to the close proximity of passenger.
There is an encoder used in the motor which controls the speed of the door movement. It also helps to determine the position of the doors.
Printers

Encoders are used to control the operation of ink heads of inkjet printers.
The encoder sends pulse signals to the industrial inkjet printer as the attached pulley rotates. The inkjet printer uses the interval between the pulse signals to recognize the speed of the object.
The use of an encoder in the printer makes it possible to print beautifully an accurately. Encoders are also used to control the rotating drum that moves the paper.
Machine tools

Encoders are used to control the horizontal movement of the table where the workpiece is placed.
For example, NC milling machines and electrical discharge machines require finishing accuracy in the range of a few microns to a few tens of microns. To achieve this, they require encoders with a resolution about 10 times higher than the required finishing accuracy.
Here are our products
Optical Encoder Wheels
Here are our products